TRAINS
EM44 4401 4401 Details 4401 Remote Control Signals HO Trains |
4401 Details
Gulgong
7 1/4 NSWGR 44 class (Alco DL500B World Series) locomotive originally
manufactured by Goodwin Alco Sydney NSW production commencing in 1957.

The name Gulgong is of a town in central NSW and means Deep Waterhole.
I picked up the sad looking parts of the 44 around mid 2009.


The 1 st job was to separate the body from the chassis. Then remove the Grey Holden
Motor and other bits from the chassis ready for a new power plant.
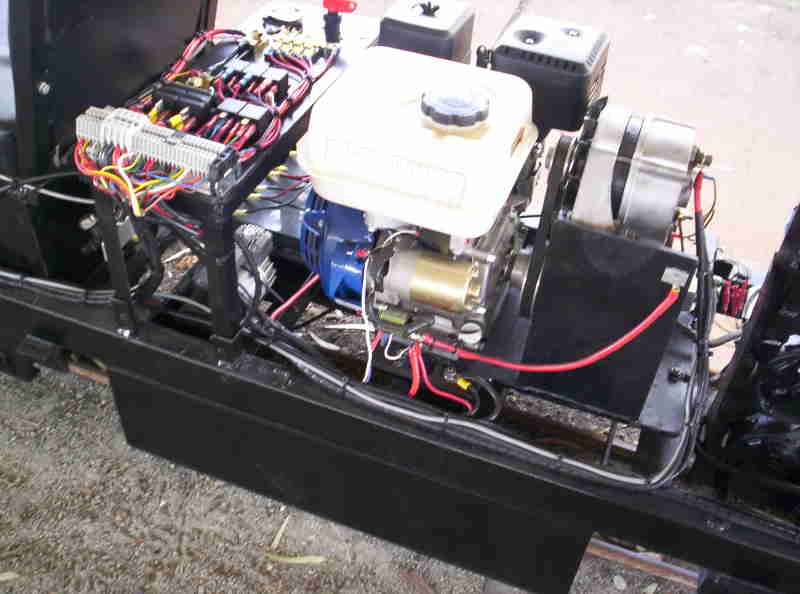
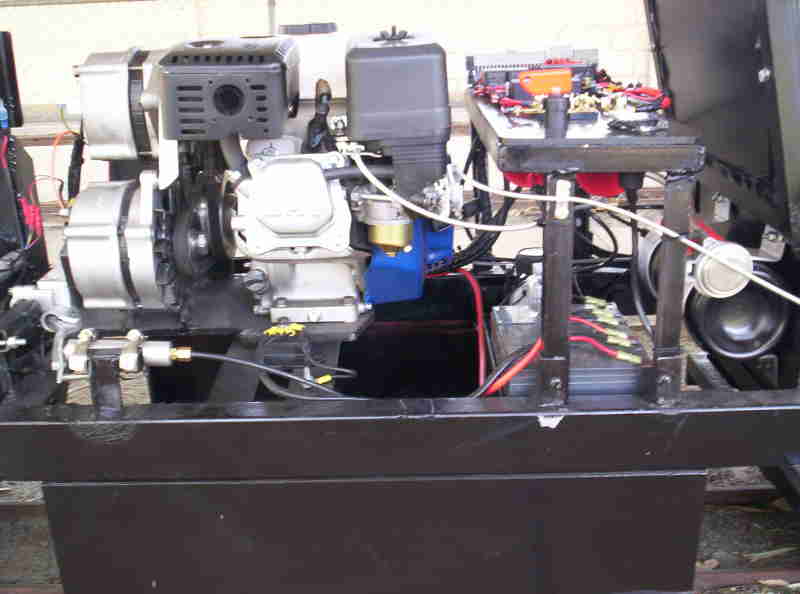
The new plant consists of a Chinese Honda knock-up (Chonder), 6.5 hp electric start
engine and belt driven to a 12V 35A Bosch alternator used as auxiliary battery charging
and main alternator excitation. Field excitation of the main alternator is controlled by a
home-brew pulse width modulator (PWM). The main traction alternator is a 12V 80A
alternator with stator connected in delta. This almost doubles the output of the unit.
The next job was to make up a traction unit for the rear CoCo bogie. The selection of a
suitable and reasonably priced traction motor (motors) became quite a challenge. After
some experimenting with commercial 24V 500W motors I found they would not supply
enough speed for a gear reduction of 10:1 needing at least 5000 rpm at the motors for a
top speed around 15 kmh. I then tried a re hashed Bosch permanent magnet starter motor
and found it to be unsatisfactory as it required more current than the power plant would
deliver to start the motor. After scratching around a friends wrecking yard I came across a
large heavy duty Nippon Denso late model Holden Commodore engine cooling fan motor
with permanent magnet field coil. I promptly gave it some Sh-- on the bench and was
more than impressed with the results. My original concept was to use four motors for
traction but with the uncertainty of the untried units I chose to use six. The power plant is
capable of delivering up to 1500 watts to the motors at 100% duty with the cooling fan
on. With the gear reduction this is adequate for use on the CMR network. The drive
motors are grouped in pairs and connected in series to make up 3 sets of 24V traction
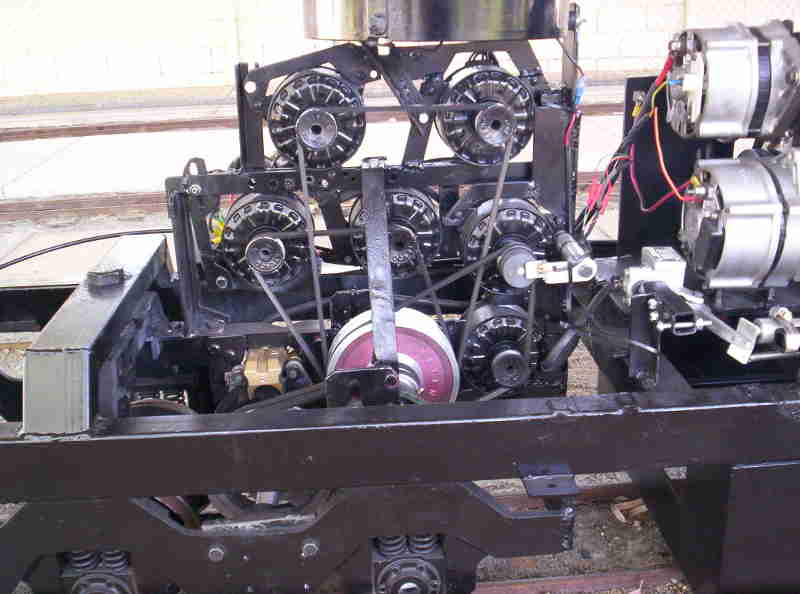

The next step was to construct the drive train using two lay shafts with ratios of 4:1 and
2.5:1. A belt drive was chosen for ease of construction using z belts from the motors to
the 4:1 reduction and twin SPAX belts for the 2.5:1 reduction. Half inch chain sprockets
were already fitted to the axils and the 2.5:1 lay shaft. I retained the chain drive on the
final. Braking was fitted to this shaft in the form of a mini motor bike front caliper and
hand lever operated master cylinder. A new rotor was made up from 6mm mild steel plate
and air actuator made to push the master cylinder hand peace. All of this is mounted on
the rear bogie and floating from the rest of the chassis with the exception of the master
cylinder.
Time for a seat, instrument, panel, control pedestal and wiring. Two 150A 12V relays are
fitted to the electrical termination panel to allow forward and reverse operation.




Now it is off to the track at CMR for some initial test runs and load tests. All concepts
were proven and after some small changes the chassis is ready.


Onto the locos bodywork. After some extensive repairs and priming of the body it was
time to paint it up in close to original colour.


Time to put it all together.


And off to the track January 2010.


Some pictures out and about.


Copyright (c) mgc Perth Western Australia 2015 and on
LATEST NEWS
I have Raspberry Pi B+ USB memory stick and SD
card images available for download or I can supply the images
mounted on 8 GB memory stick and a small SD card.
The image has lots of goodies, Gambas3 with lots of example
apps, VncServer, Nautilus and lots more.
Both of these are subject to a modest handling charge and are
also subject to post and packing cost.
Email for downloads, prices, shipping details
or more information.
mike.crean@mail.com