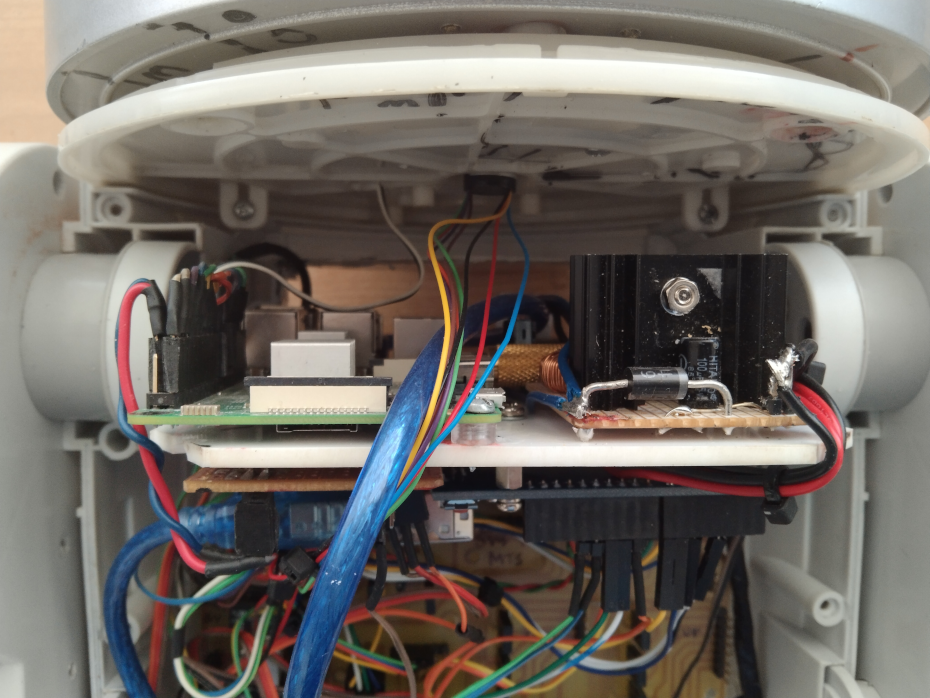
The internals of the half full size R2D2 before I started to upgrade the basic shell.


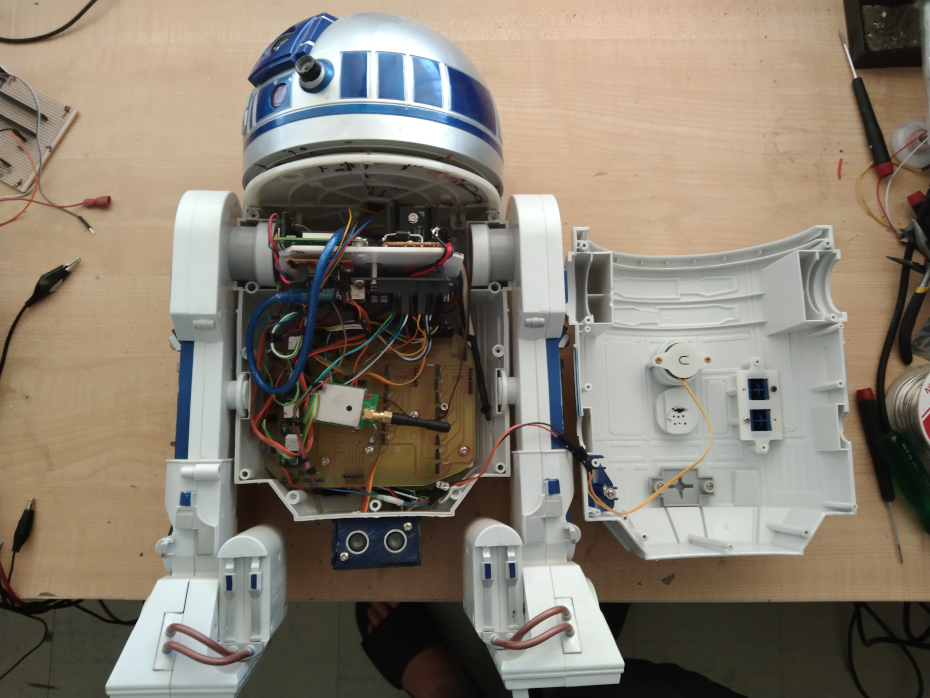
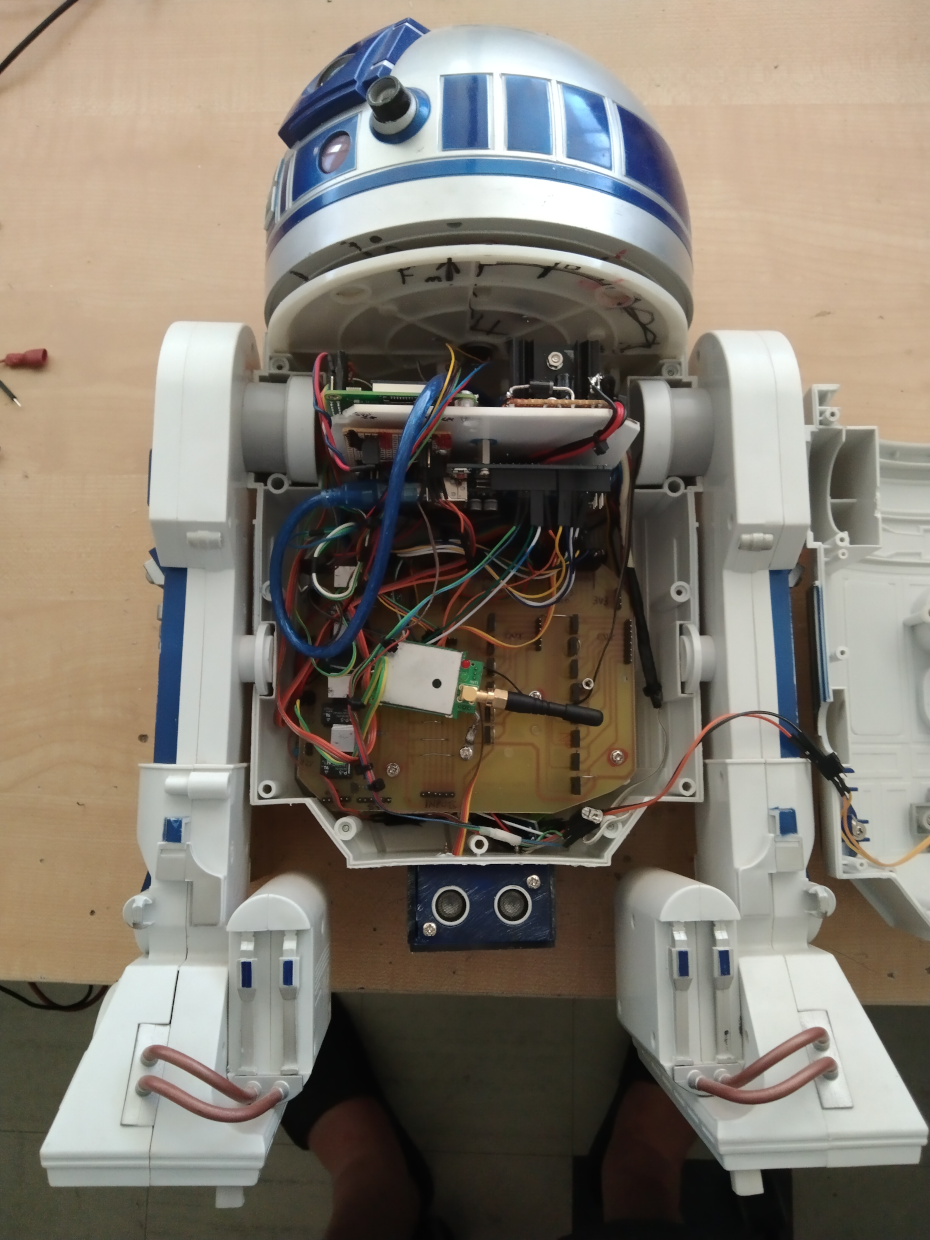
Here is my half size R2D2 with main control by a Raspberry Pi 4 and two Arduino UNO's for direct control of servos
and DC drive motors. There is a home brew mother board with high power motor and relay control.

Below is the rear view of the 12V external power connector and the charging port for the 12V Li-Ion Battery.

Below the right leg is extended using a servo motor.

433 mHz modem Mood LED Distance sensor.
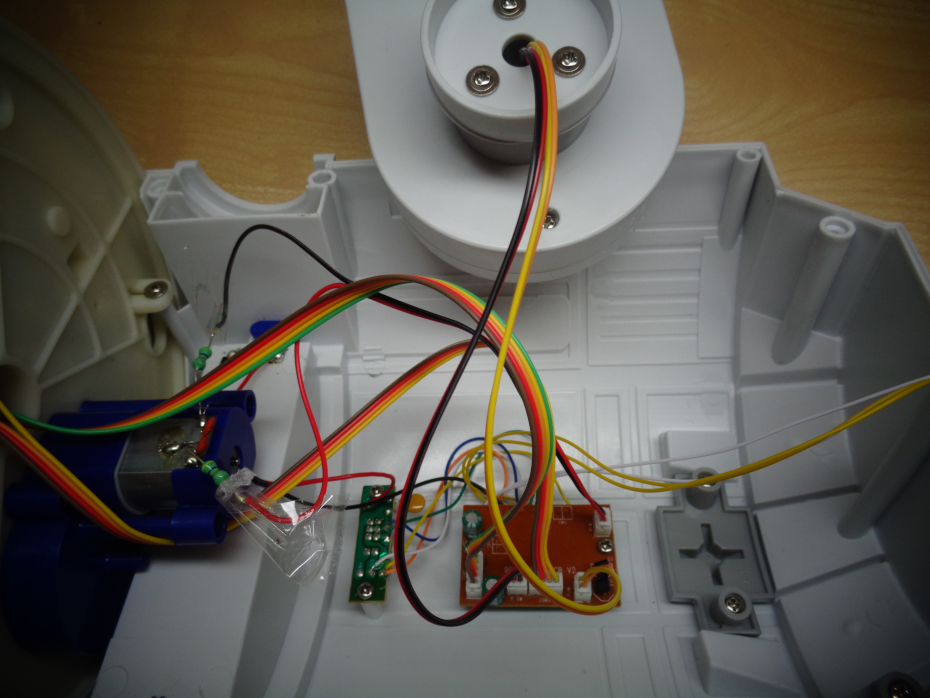
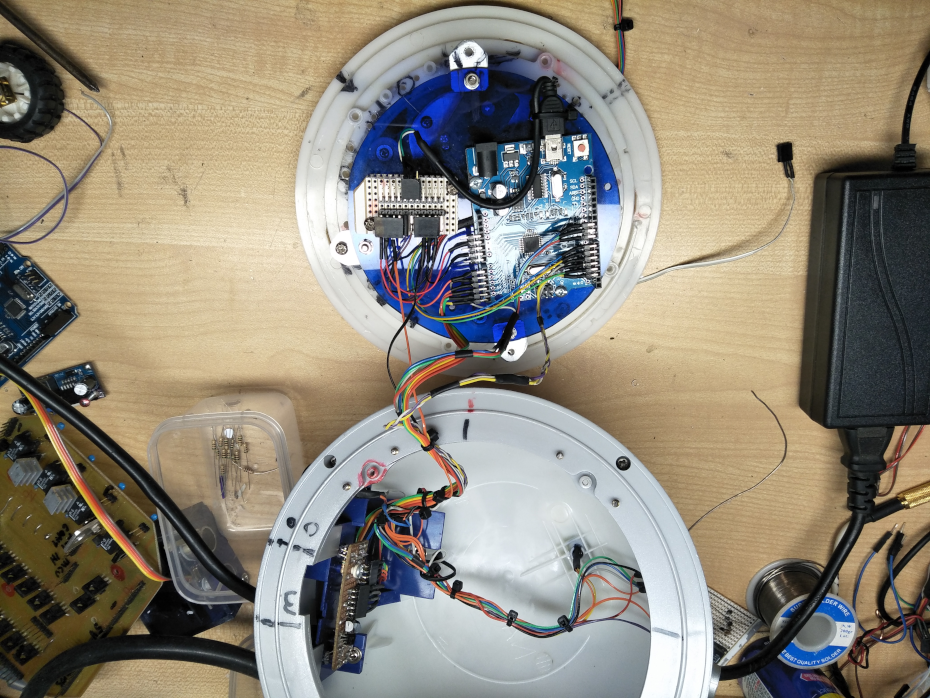
Below are the internals of the turret. Containing Arduino UNO, and LED drivers. A DC motor rotates the turret and
cables from the body are routed through a slip ring connector.
433 mHz hand controller for remote control of R2D2. A WiFi connection can be made from a PC or Laptop. Using
home brew software to take full control of R2D2.
